SFT for AV video captioning and VQA
Authors: DeLesley Hutchins • Jingyi Jin • Amol Fasale (NVIDIA) • Joseph Wang (Uber)
| Model | Workload | Use Case |
|---|---|---|
| Cosmos Reason 1 | Post-training | AV video captioning and visual question answering |
Overview
Autonomous vehicles must operate under a variety of different conditions. These conditions include include different kinds of weather, times of day, types of roads, road conditions, driving environments, and traffic situations. Autonomous vehicles must also be able to recognize and respond to traffic signals, posted traffic signs, and road markings. Furthermore, they must be able to identify situations where the safety of human lives are at risk, such as the presence of cyclists and pedestrians.
It is relatively easy to collect large quantities of video driving data from dashcams, but such data is initially unlabeled. In order to make use of video data, it is often necessary to have high-quality labels or captions; such labels allow video clips to be organized into a searchable database, so that it is possible to locate interesting driving situations for training or testing purposes. Human annotations are high quality, but expensive. Video-language models, such as Cosmos Reason, can be used as an auto-labeler or auto-captioner instead.
This recipe describes how to fine-tune Cosmos Reason to produce high-quality domain-specific captions and labels for video data. The baseline Reason model can produce captions as-is, but we show that the quality of the captions can be improved by fine-tuning on a dataset of human annotations.
Finetuning on human annotations is also a good way to improve visual question answering (VQA) skills on domain-specific tasks. Many of the specific annotations used in this recipe can also be interpreted as questions to the model, e.g. "What are the weather conditions?"
The basic steps in this recipe are as follows:
- Data: Collect an initial dataset of video clips with human annotations.
- SFT: Perform supervised fine-tuning of the model on the dataset.
- Evaluation: Evaluate the quality of the results, using another LLM as judge.
Data
For this recipe, we use an internal NVIDIA dataset, which consists of short video clips, each of which is between 5 and 10 seconds long. These clips were passed to a team of human annotators, who answer a series of questions about the clip.
Here's an example video clip:
And here are the human annotations for the clip in json format:
{
"weather": "Light rain",
"lighting": "Daytime (low\u2011contrast daylight)",
"road_conditions": "Wet surface with puddles",
"traffic_light": "N/A",
"traffic_sign": "A no stopping sign.\nA keep right sign.\nA directional arrow pointing straight.\nA crossroad ahead sign.\n",
"additional_traffic_rules": null,
"road_type": "Collector road - moderate speed with frequent driveways and intersections.",
"junction_type": "Straight segment - uninterrupted roadway with no intersections or turns",
"lane_type": "Single lane each direction, no turn lanes.",
"additional_map_rules": null,
"interactive_expanded_metaaction": ["Yield to VRUs", "Vehicle following"],
"safety_analysis": "The ego vehicle proceeds straight on the right lane of a two-lane collector road during the daytime on a wet road. The weather is lightly rainy. As the ego proceeds, it follows another vehicle ahead of it while crossing by numerous traffic signs, including a no stopping sign, a keep right sign, a directional arrow pointing straight, and a crossroad ahead sign. While proceeding, a pedestrian is seen crossing the road in front of the ego, causing the ego to slow down and yield to them.",
"driving_difficulty": 3,
"rule_violation": "False",
"interesting_scenario": "True"
}
Dataset Statistics
Split Distribution
- Total samples: 10,273
- Training set: 9,273 samples (90.3%)
- Evaluation set: 1,000 samples (9.7%)
Data Size
- Total dataset size: 174 GB
- Training split: 157 GB
- Evaluation split: 17 GB
- Average video size: ~17 MB per sample
- Video size range: 3.2 MB - 54.5 MB
- Average annotation file size: ~1.5 KB per sample
Prompting the model
In order to get Cosmos Reason to produce annotations similar to the above, we provide the model with a detailed prompt. The prompt should provide clear instructions on how to answer each question, and have enough detail that it can be followed by either humans or LLMs.
System prompt (annotations)
system_prompt.txt
You are an expert video annotator, and your job is to produce high-quality
annotations for driving videos. The annotations will be used as training data
for autonomous vehicles, so they must be both detailed and accurate. You
should pay particular attention to any details in the video that are relevant
to driving safety.
Carefully review the following video clip, and provide annotations in JSON format,
according to the rubric given by the user.
User prompt (annotations)
user_prompt.txt
Please analyze the video, and provide accurate and detailed annotations.
Your answer must be provided in the following JSON format:
{
"weather": <string>,
Describe the weather conditions. Should be one of the following:
"Clear skies",
"Overcast",
"Partly cloudy",
"Light rain",
"Heavy rain",
"Light snow",
"Dense fog",
"N/A"
"lighting": <string>,
Describe the lighting conditions. Should be one of the following:
"Daytime (diffused light)",
"Daytime (low-contrast daylight)",
"Daytime (direct sunlight)",
"Night (poorly lit; few/no streetlights)",
"Night (well-lit by streetlights)"
"road_conditions": <string>,
Provide a brief description of both the condition of the road (dry, wet, icy etc.),
and the type of road (asphalt, cobblestones, gravel, narrow, etc.).
For example:
"Dry, clean asphalt"
"Wet asphalt with puddles"
"Wet asphalt with patches of ice"
"Icy and snow-covered"
"Dry, clean asphalt with snow on the sides of the road"
"A wet cobblestone road"
"Narrow road with mud and gravel"
"A dry dirt road"
... etc.
"traffic_light": <string>,
Describe any traffic lights, and the ego vehicle's response to them. For example:
"No traffic light"
"The traffic light is green, so the ego vehicle maintains speed and proceeds through the intersection."
"The light is red, so the ego vehicle to comes to a full stop."
"The signal is flashing yellow, instructing the ego vehicle to proceed with caution."
"The traffic light turns from green to yellow and then red. The ego vehicle slows and stops."
"The traffic light turns yellow, and the ego vehicle acclerates through it before it changes to red."
"A left turn arrow goes from red to green; the ego vehicle enters the intersection and turns left."
"The traffic light is not operational. The ego vehicle stops, then proceeds."
... etc.
"traffic_sign": <string>,
Describe any relevant traffic signs that the ego vehicle must pay attention to.
If there are multiple signs, mention all of them. For example:
"There is a stop sign marking a four-way stop."
"A yield sign requires the ego vehicle to yield to cross traffic."
"Speed limit 30mph"
"One-way (pointing right)"
"School zone, speed limit 15mph"
"No U-turn sign."
"Road work ahead."
"A 'Do Not Enter' sign marks the end of a freeway off-ramp."
... etc.
"additional_traffic_rules": <string> or null,
Provide one or two sentences that describe any special traffic rules that apply
on this particular section of road. For example:
"There is a construction zone ahead, and cars must yield to construction."
"There is a school zone, with a speed limit of 15mph."
"There is a pedestrian crosswalk."
"End of no parking zone."
"Two left lanes must turn left, right lane must turn right."
... etc.
"road_type": <string>,
Describe the kind of road that the ego vehicle is traveling on. For example:
"Local street -- low-speed mixed residential/commerical"
"Collector road -- moderate speed with frequent driveways and intersections"
"Arterial road -- high-capacity through traffic, limited direct access"
"Highway/freeway"
"Freeway on-ramp"
"Country road"
"Narrow urban alleyway"
... etc.
"junction_type": <string>,
Describe any junctions or intersections that the ego vehicle either passes
through, or is forced to stop at. For example:
"Straight segment - uninterrupted roadway with no intersections or turns"
"Four-way intersection -- crossing of two roads with traffic controls"
"T-intersection without traffic controls"
"Curved road segment turning left, no intersections"
"Large roundabout"
... etc.
"lane_type": <string>,
Describe the number and type of lanes in the road that the ego vehicle is
driving on. For example:
"Single lane each direction, no turn lanes"
"Two lanes each direction, plus a center turn lane"
"Four lanes in the ego's direction, including two right-turn-only lanes and a left-turn only lane."
"Two lanes, one way street"
"There is a single lane in each direction, plus a bicycle lane"
... etc.
"additional_map_rules": <string> or null,
Provide one or two sentences that describe any markings on the road itself
that indicate special traffic rules for this particular section of the road.
For example:
"There are pedestrian crosswalk markings on the road."
"Bicycle lane markings are visible on right."
"The road is shared with the tram lines."
"There's an HOV carpool lane on the left with HOV diamonds and the letters 'CAR POOL LANE'."
"A right-turn-only arrow in the rightmost lane."
... etc.
"interactive_expanded_metaaction": null or [ <list of strings> ],
If the ego vehicle's behavior falls into any of the following categories,
provide a list of which categories best describe the behavior. Return null if
no categories match. Categories must be one of:
"In-lane nudging",
"Yield to VRUs",
"Vehicle following",
"Out-of-lane nudging",
"Yield to vehicles",
"Overtake VRUs",
"Vehicle cut-in ahead",
"React to animals",
"Overtake vehicles"
"safety_analysis": <string>,
Write a short paragraph describing the situation that the ego vehicle is
driving in, and the sequence of actions that the vehicle performs (e.g. lane
changes, turns, stops, etc.) The paragraph should focus on describing any
events or part of the situation that are relevant to safety, e.g. the presence
of pedestrians or parked cars, sudden lane changes by the ego vehicle or other
drivers, difficult driving conditions, and so on.
"driving_difficulty": <integer between 1 and 4>,
On a scale of 1 to 4, rate the driving difficulty.
1: very easy -- clear weather, low traffic, no hazards.
2: normal -- some traffic or adverse weather, but not too much.
3: difficult -- heavy traffic, rain, pedestrians, etc.
4: very diffult -- poor visibility, rush-hour traffic, treacherous road conditions, etc.
"rule_violation": <boolean>,
"True" if there was a violation of traffic law in the video, "False" otherwise.
"interesting_scenario": <boolean>,
"True" if this driving scenario contains interesting or unusual characterists
that make it good training data. "False" if it is normal or uninteresting
driving conditions.
}
Running Cosmos Reason in inference mode
Using the above prompt, the base Cosmos Reason model can produce video annotations that match the required format. To generate annotations for a set of videos, run the following script:
# from the Cosmos cookbook directory
cd scripts/examples/reason1/av_video_caption_vqa
mkdir eval
ln -s /path/to/videos eval/videos
./avha_caption.py --output-dir ./output/baseline
Supervised fine tuning
Cosmos-rl provides infrastructure for post-training of Cosmos models, including both supervised fine-tuning and reinforcement learning. In this case, we will do supervised fine-tuning, and post-train the model to predict the human annotations, given the video and the prompt described above.
Setup
To start, please follow the example SFT setup instructions in the Cosmos Reason 1 respository. In particular, be sure to install redis-server, and log into wandb.
Copying the SFT code to cosmos-reason
The fine-tuning code requires four files:
- The system and user prompts described above.
- The
avha_sft.pyscript creates a custom dataset, which combines each video clip with the appropriate prompt and the human annotations. - The
avha_sft.tomlconfig file sets the SFT hyperparameters.
Check out the cosmos-reason github repository, and then run the following shell script, which copies the necessary files from cosmos-cookbook over to cosmos-reason:
# In the cosmos_cookbook/scripts/examples/reason1/av_video_caption_vqa/ directory
./setup_sft.sh /path/to/cosmos-reason
Training Configuration
Most of the training configuration is copied from the existing SFT examples. The important differences are shown below:
Training Configuration: avha_sft.toml
[train]
epoch = 20 # Train for 20 epochs
output_dir = "./outputs/avha_sft" # Output directory
...
train_batch_per_replica = 16 # Reduced batch size for memory efficiency
[logging]
project_name = "cosmos_reason1_avha" # Custom project name
experiment_name = "avha_sft" # Custom experiment name
[train.train_policy.dataset]
name = "/path/to/dataset/train" # Path to local dataset
Using cosmos-rl for fine-tuning
Run the following commands to fine-tune the model with cosmos-rl:
# In the cosmos-reason1/examples/post_training_hf directory
just install
source .venv/bin/activate
cosmos-rl --config configs/avha_sft.toml scripts/avha_sft.py
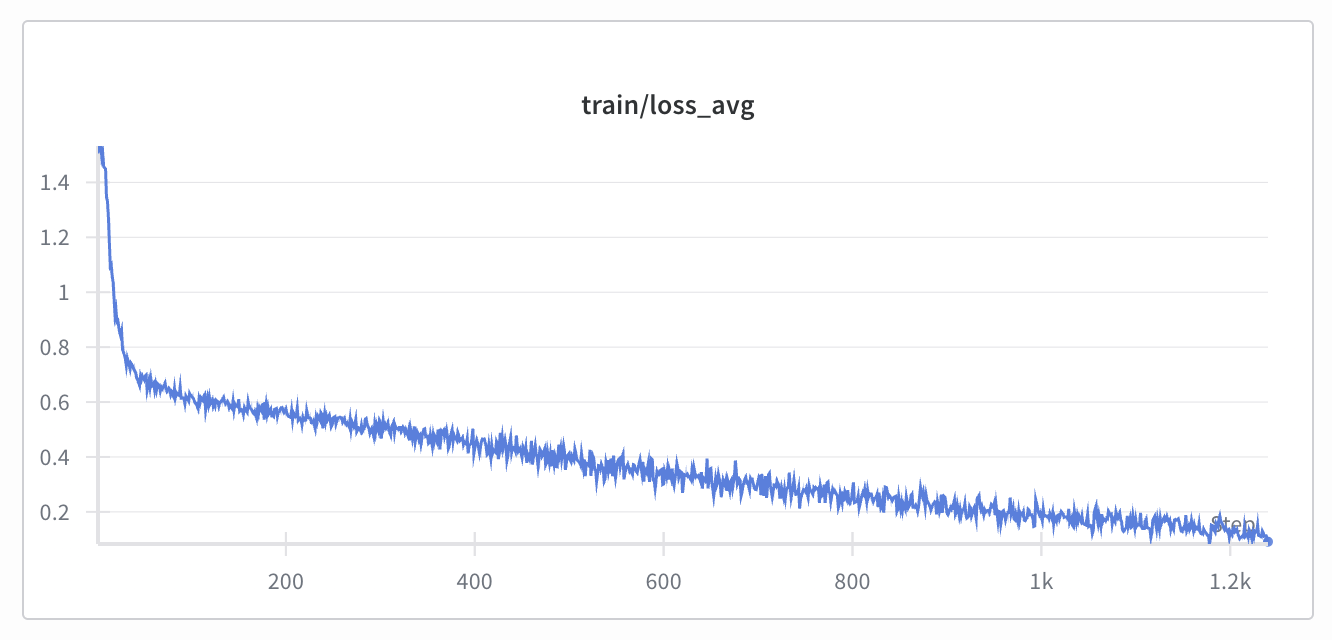
You should see a training loss curve that looks something like the following:
Running the fine-tuned model in inference mode
Once supervised fine-tuning is done, use the SFTed model to generate a new set of annotations, with the same prompt as before. Instead of loading the default model weights from HuggingFace, point the inference script at the directory where the fine-tuned weights are stored:
# In the cosmos_cookbook/scripts/examples/reason1/av_video_caption_vqa/ directory
./avha_caption.py --model-path /path/to/safetensor/weights/ --output-dir ./output/sft
Evaluation using an LLM as judge
A few of the annotations shown above are multiple-choice, namely: "weather", "lighting", "driving difficulty", "rule_violation", and "interesting_scenario". However, the answers to the most interesting questions are all free-form text, in which the human annotator can write whatever description they want.
Since the answers are not multiple choice, there is no way to compute an exact accuracy. Instead, we used another LLM to judge the responses. For each question, the LLM auto-judge compares the LLM response against the human annotation, and scores it on a sliding scale from 1 to 5. The auto-judge does not require access to the original video, so any text LLM can be used as judge. We chose to use ChatGPT 5 for our experiment, as it seemed to produce accurate comparisons.
Note that the score of the auto-judge is not an objective measure of "correctness" or "accuracy". The longer and more complicated the answer, the less likely it is that two answers will have a close match. For example, on "safety_analysis", it is entirely possible for the human annotator and the LLM captioner to notice different things. For example, the LLM may point out that an intersection has a crosswalk, while the human doesn't feel that it's important to point that out, because all intersections with traffic lights have crosswalks. In that case, the LLM response is technically correct, but it will only receive a partial match -- i.e. a score of 3/5. Even if two different humans were to answer that question, their answers would be unlikely to match exactly.
However, the auto-judge scores do serve as a rough measure of how similar the LLM responses are to the human responses, so higher numbers are better.
Here are the prompts for the auto-judge:
System prompt (for LLM judge)
System prompt for LLM judge
You are a helpful assistant who has been tasked with evaluating the reponses produced by
another LLM. A series of questions were given to both humans and LLMs, and we want to
evaluate how closely the LLM response matches the human response.
The match should be scored on a scale between 1 and 5, according to the following rubric:
1: The responses don't match at all; the LLM gave a completely different answer to the
human.
2: There is some overlap between the two responses, but overall the LLM response is
substantially different from the human response, and thus should be considered to be
"wrong" overall.
3: The LLM got some things right, and some things wrong.
4: The responses are clearly similar, but there are still a few details where the
LLM response does not match the human response.
5: The responses match very closely. Note that the phrasing may be different, but the
match should still be given a grade of 5 if they have the same meaning. For example,
when asked about weather, the human may respond "clear blue skies", while the LLM may
respond "the sky is sunny and cloudless", but these mean the same thing.
Give your answer in the following format. First, write a short description of why you
think the responses match or don't match. If the responses don't match, be sure to
explain why you think they are different. Then provide your score.
User prompt
User prompt for LLM judge
Scoring the model
To score the LLM responses, run the following script:
cd scripts/examples/reason1/av_video_caption_vqa
export OPENAI_API_KEY="your_openai_api_key"
avha_judge.py --output-dir ./output/baseline --score-dir ./scores/baseline
avha_judge.py --output-dir ./output/sft --score-dir ./scores/sft
avha_compare_scores.py
⚠️ Security Warning: Store API keys in environment variables or secure vaults. Never commit API keys to source control.
Results
The results of the fine-tuning experiment were as follows:
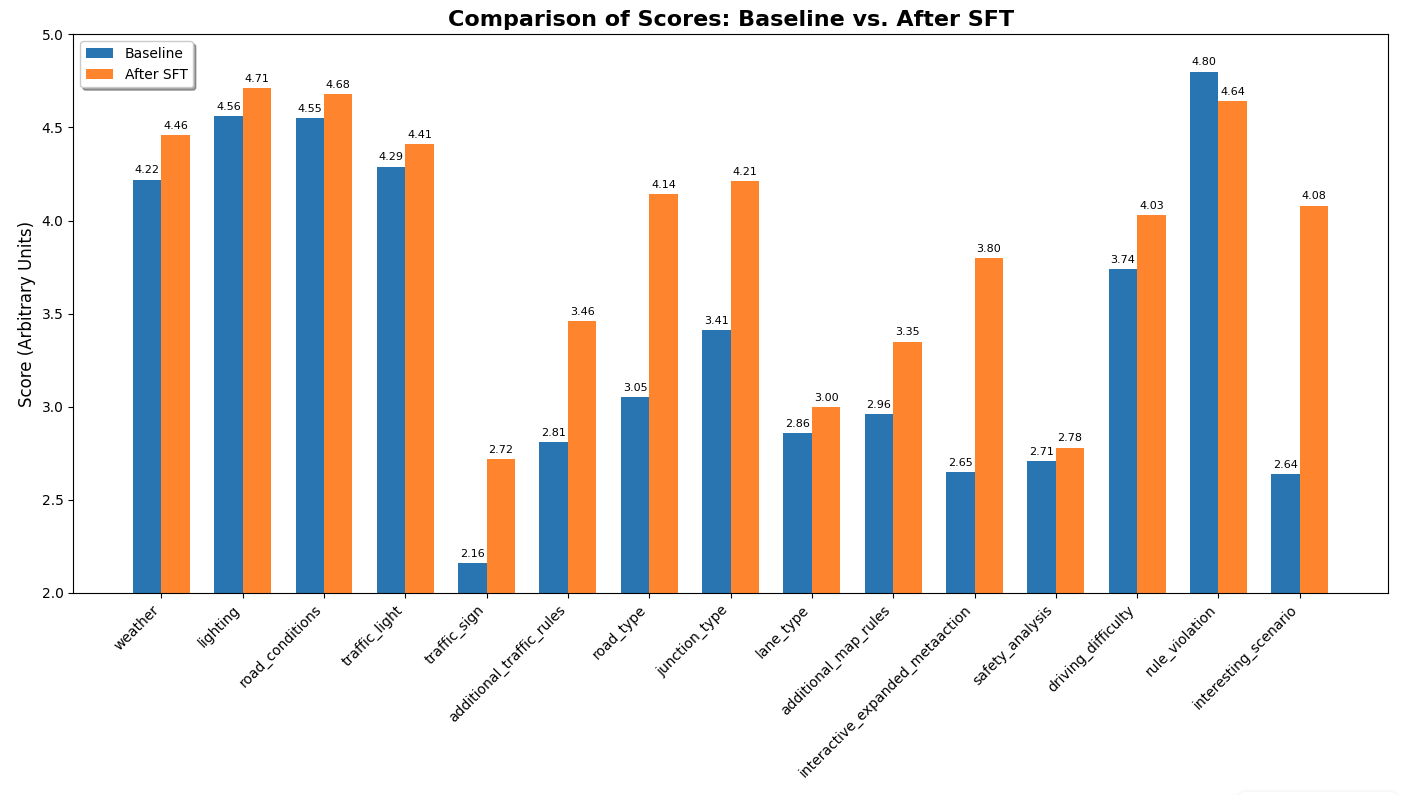
Fine-tuning the model on human annotations improved annotation scores across the board. The first four questions -- "weather," "lighting," "road_conditions," and "traffic_light" -- were easy. They show only modest improvement, because the baseline scores were already high.
The hardest question by far was "safety_analysis." It shows very little improvement, but that is at least partly due to the fact that it is very hard for the auto-judge to compare paragraph-level responses. Most answers, even if the answers are valid, will only be a partial match -- i.e. a score of 3.
The mid-difficulty questions are "additional_traffic_rules," "road_type," "junction_type," and "lane_type". Most of these show substantial improvement. These are questions that the baseline model did poorly on, but the auto-judge is able to score effectively.
The only case where the fine-tuned model does worse is "rule_violation". For this question, the baseline model gets a near-perfect score simply by answering "False" every time.
Conclusion
This recipe demonstrates that the Cosmos Reason model can be used out-of-the box for video captioning and VQA, and the baseline model is able to answer simple questions about weather and road conditions with high accuracy. However, for more complex domain-specific questions, performance of the model can be improved substantially by supervised fine-tuning on human annotations.
Document Information
Publication Date: October 13, 2025
Citation
If you use this recipe or reference this work, please cite it as:
@misc{cosmos_cookbook_av_video_captioning_vqa_2025,
title={SFT for AV video captioning and VQA},
author={Hutchins, DeLesley and Jin, Jingyi and Fasale, Amol},
year={2025},
month={October},
howpublished={\url{https://nvidia-cosmos.github.io/cosmos-cookbook/recipes/post_training/reason1/av_video_caption_vqa/post_training.html}},
note={NVIDIA Cosmos Cookbook}
}
Suggested text citation:
DeLesley Hutchins, Jingyi Jin, & Amol Fasale (2025). SFT for AV video captioning and VQA. In NVIDIA Cosmos Cookbook. Accessible at https://nvidia-cosmos.github.io/cosmos-cookbook/recipes/post_training/reason1/av_video_caption_vqa/post_training.html