Egocentric Social and Physical Reasoning with Cosmos-Reason2-8B
Authors: Tingyu Zhang • Sharon Yang Organization: IntBot Inc.
| Model | Workload | Use Case |
|---|---|---|
| Cosmos-Reason2-8B | Inference | Egocentric social and physical reasoning for robotics |
1. Overview
IntBot is a robotic startup company building social intelligent humanoid robots to address the structural labor shortage across service industries including hotels, airports, etc. IntBot robots elevate guest experiences by handling routine inquiries with warm, human-like presence and expressive body language, engaging in natural conversation across 50+ languages, and providing accurate answers, directions, and local recommendations. Available 24/7 and customizable to each brand, IntBot robots reliably cover repetitive and always-on service needs, enable human staff to focus on more important tasks.
 IntBot at NVIDIA GTC |
 IntBot at NVIDIA booth reception |
To be effective in real-world service settings, IntBot’s robots must continuously perceive, interpret, and respond to a wide range of human actions, intentions, and social cues, including:
- Greetings and gestures — detecting and appropriately responding to waves, fist bumps, handshakes, and other invitation signals
- Shared attention management — maintaining engagement with multiple people simultaneously and determining who the robot should address at any given moment
- Social context boundaries — understanding when not to engage, such as when two guests are already conversing with each other or when interruption would be socially inappropriate
- Object handoffs — recognizing when a person is offering an item (e.g., documents, badges, promotional materials) (future work)
- Emotional state awareness — inferring when a guest appears confused, frustrated, disengaged, or in need of assistance (future work)
Together, these capabilities enable socially aware, context-sensitive interaction that goes beyond scripted dialogue and is essential for deploying robots at scale in live public environments, which is the key motivation behind this evaluation. The tests below focus on greetings/gestures, object motion, shared attention, and social boundaries; object handoffs and emotional state awareness are planned for future evaluation.
This recipe evaluates Cosmos-Reason2-8B on a set of targeted egocentric video tests designed to probe robot-relevant reasoning, including:
- Human intent directed toward the robot
- Object motion relative to the robot
- Spatial relationships among multiple people
- Social context awareness (when not to engage)
Performance is compared directly against Qwen3-VL-8B-Instruct, the base vision-language model underlying Cosmos-Reason2-8B, using identical inputs and prompts. The goal is to isolate the impact of Cosmos-specific physical and social reasoning alignment, rather than differences in model scale or raw visual recognition capability.
2. Experimental Setup
Inputs
- Short RGB videos (2–10 seconds)
- Egocentric camera perspective ("the camera view is my view")
- Natural-language prompts explicitly framed from the robot's point of view
Models Evaluated
Controls
Both models were evaluated using:
- The same video clips
- Identical prompts
- The same inference pipeline
This controlled setup ensures that observed differences reflect reasoning behavior, not experimental variance.
3. Evaluation Results
Note: All test images are extracted from egocentric video recordings. Faces have been blurred to protect privacy.
3.1 Human Intent Toward the Robot (Fist Bump)
Scenario
A person performs a fist-bump gesture directed at the robot.
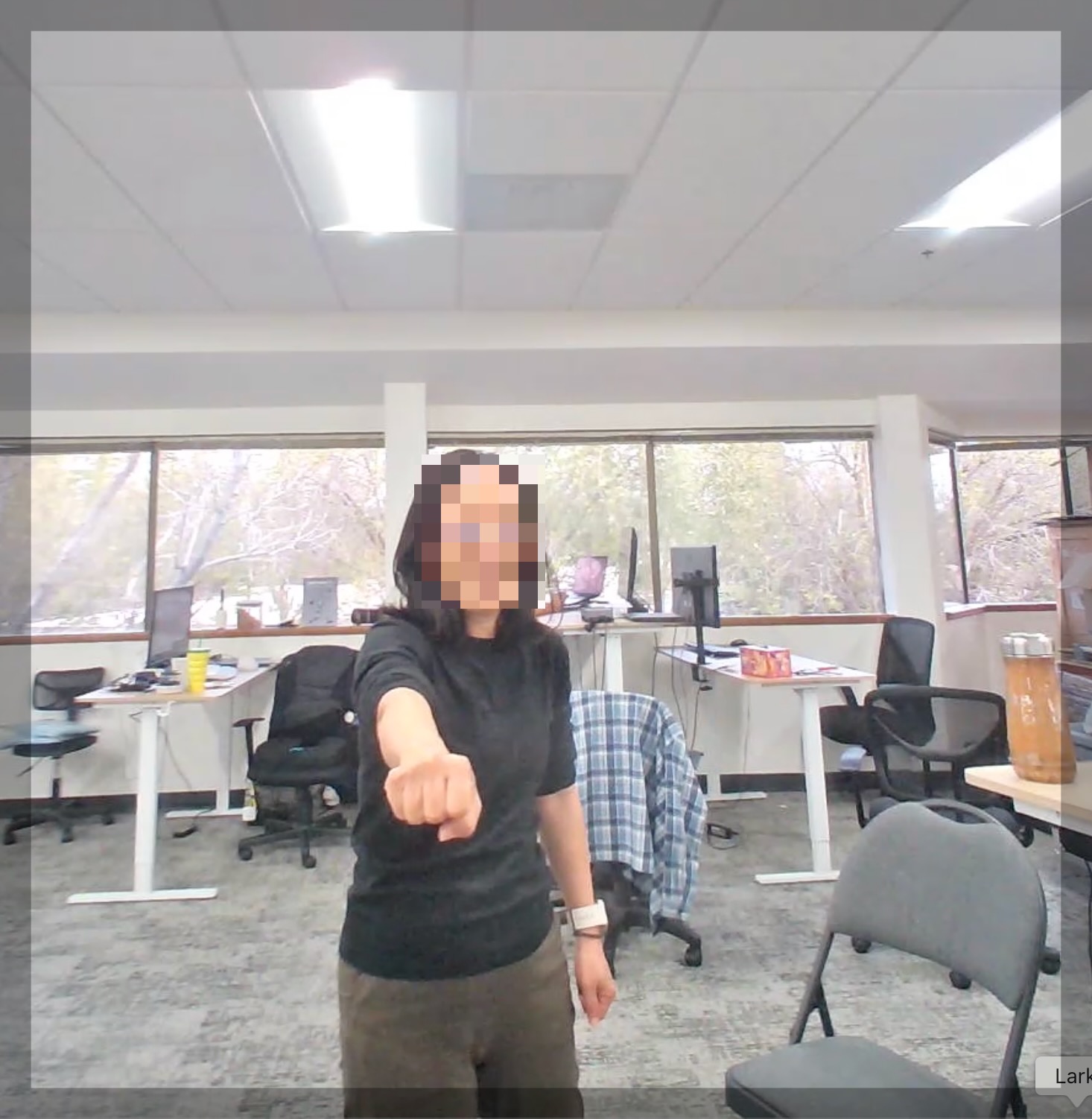
Sample frame: Person initiating fist bump toward the robot's egocentric view
Prompt
"Is this person doing a fist bump at me? Can you predict what is the most likely position her fist will be in the next 2 seconds?"
Ground Truth
The person is intentionally fist-bumping the robot.
Observed Outputs
| Model | Outcome |
|---|---|
| Cosmos-Reason2-8B | Correctly identifies a fist bump directed at the robot and predicts persistence of the fist-bump pose |
| Qwen3-VL-8B-Instruct | Misclassifies the gesture as pointing and predicts a static, non-interactive posture |
Raw Model Outputs
**Cosmos-Reason2-8B:** > Yes, the person is doing a fistbump with her right hand. In the next 2 seconds, her fist will likely remain in a fistbump position, maintaining contact with the viewer's fist as she holds the gesture. **Qwen3-VL-8B-Instruct:** > No, the person is not doing a fistbump. She is pointing her right index finger forward toward the camera, with her fist clenched but not extended for a fistbump. Her gesture appears to be a direct, assertive, or commanding motion rather than an interactive or celebratory one. > > **Most likely position of her fist in the next 2 seconds:** > Her fist will likely remain clenched and extended forward, continuing to point at the camera. She may slightly adjust her arm's angle or tighten her grip, but the overall position—pointing forward with a clenched fist—will likely persist. There's no indication she will retract her arm or move her fist toward her own body or toward the camera for a fistbump. > > In short: **Her fist will stay pointed forward, likely with minor adjustments in angle or tension, but not retracting or moving toward a fistbump.**Interpretation
Cosmos-Reason2-8B successfully infers interactive social intent toward the robot, whereas the base model focuses primarily on gesture appearance without recognizing engagement intent.
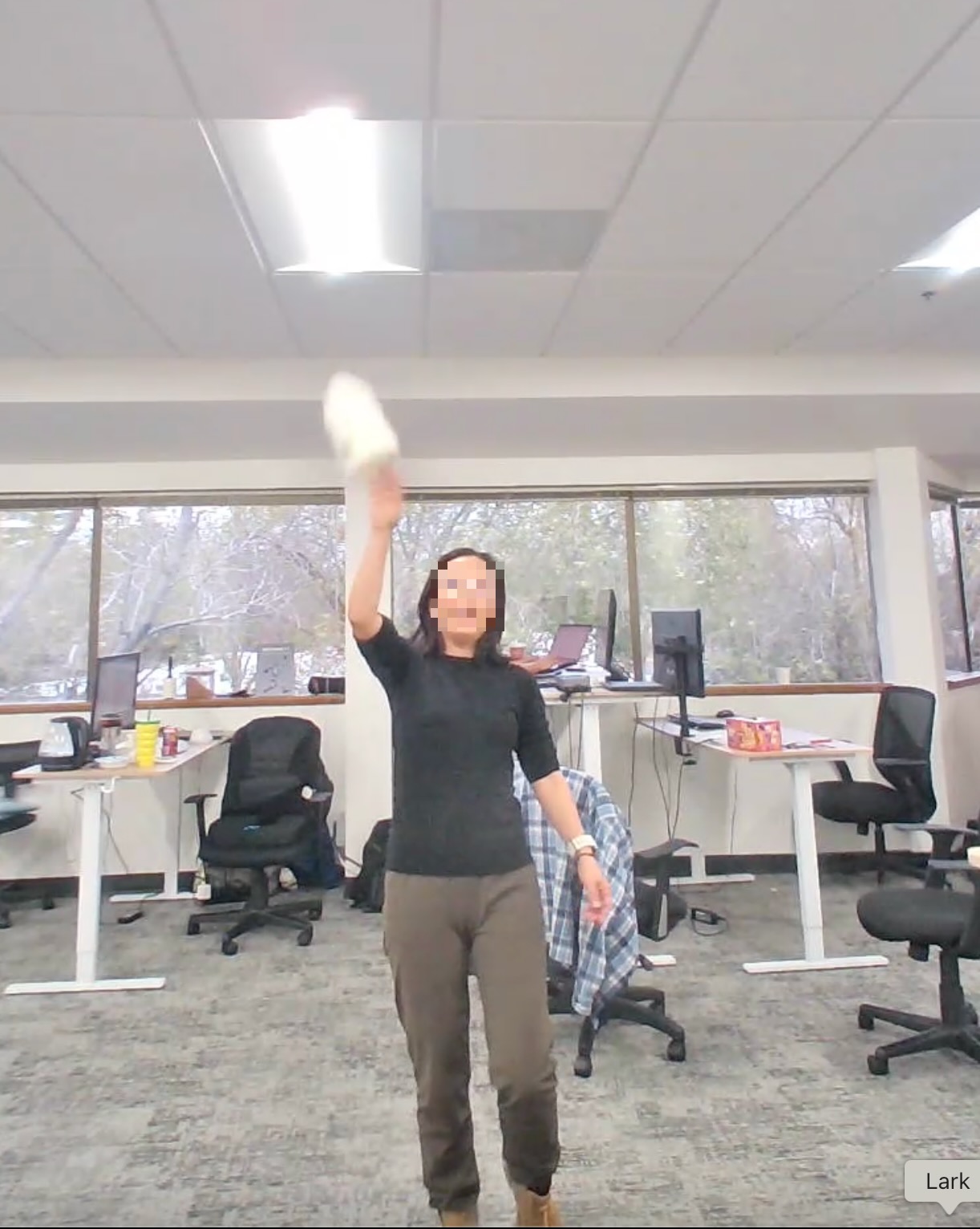
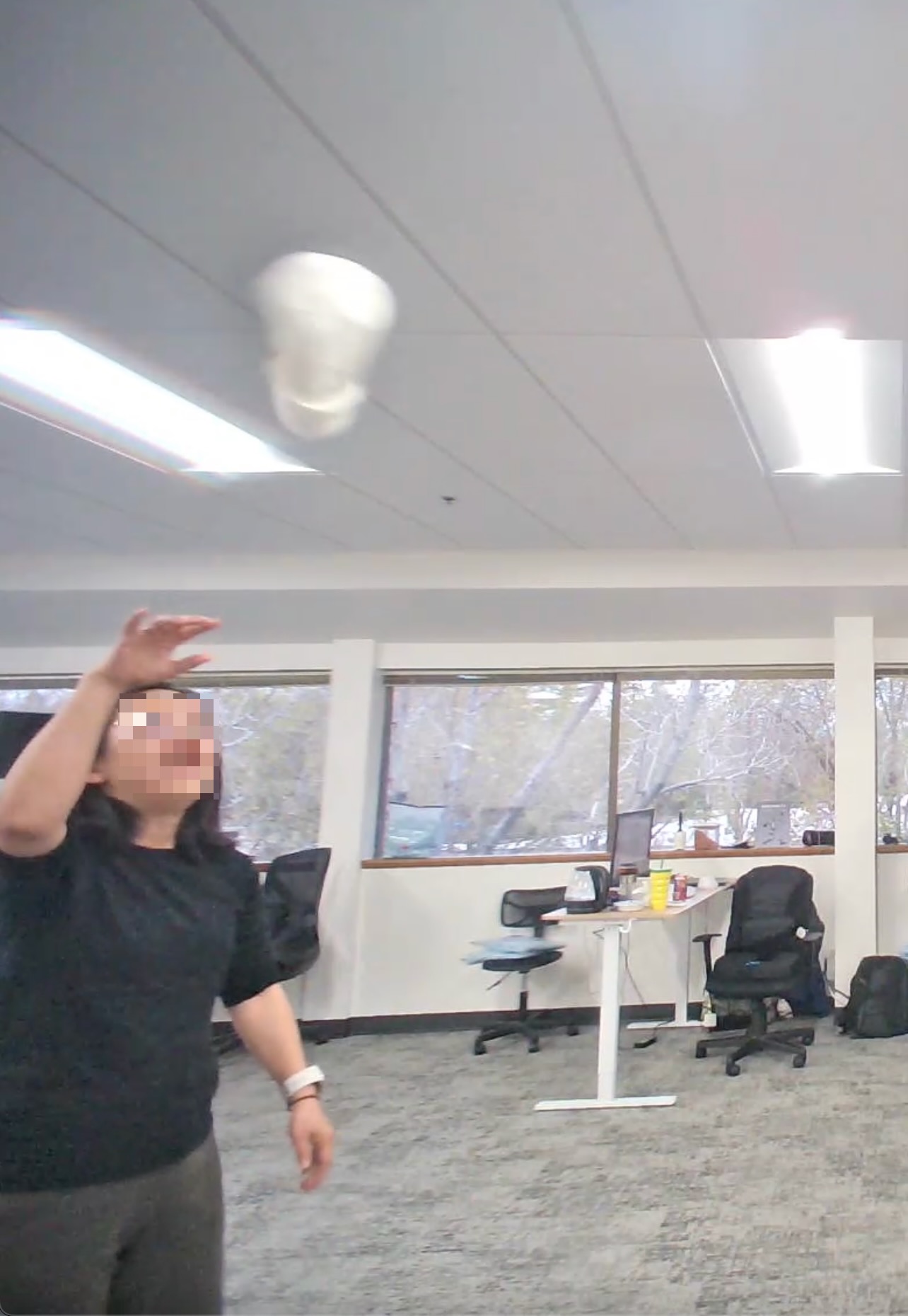
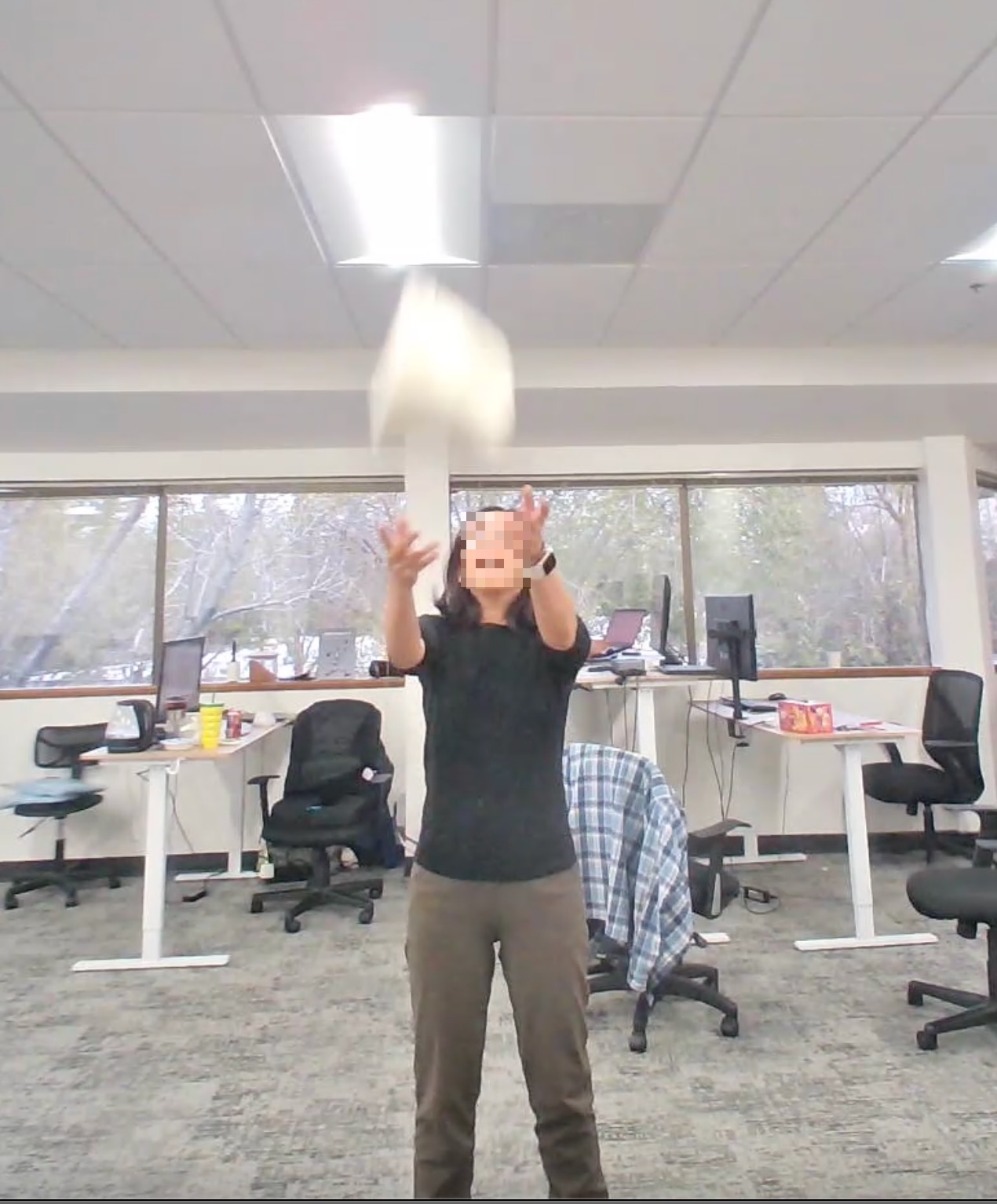
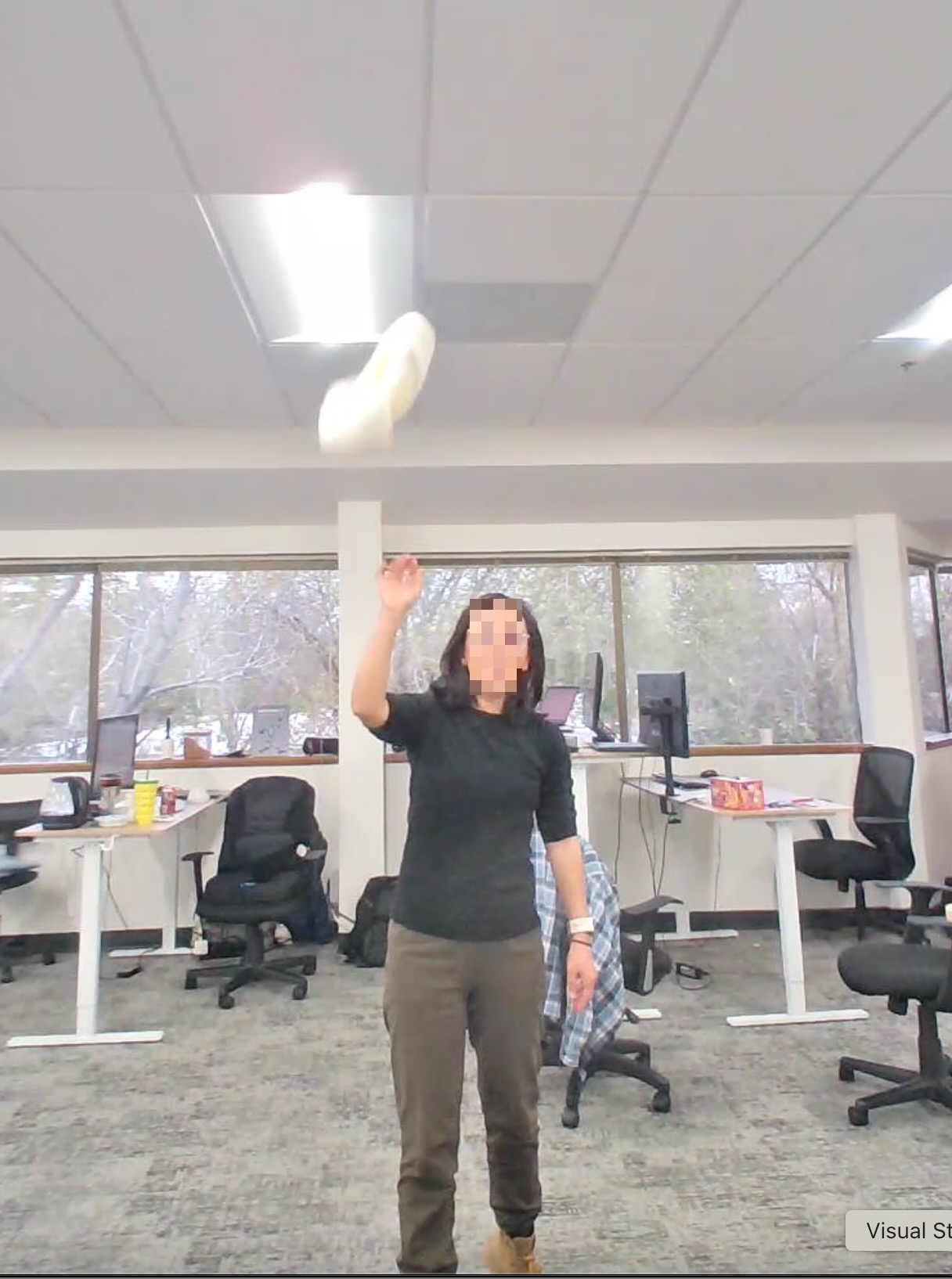
3.2 Object Motion, Distance, and Risk (Hat Scenarios)
Seven hat-related videos test diverse object motion patterns:
- Side throw away from the robot
- Spin-and-throw toward the robot
- Lateral throw across the robot's field of view
- Toss upward and fall
- Spinning prior to a throw
- Throw preparation posture
- Post-throw recovery
 Side throw away |
 Spin and throw |
 Lateral throw |
 Toss upward |
 Spinning |
 Throw preparation |
 Post-throw recovery |
||
3.2.1 Robot-Relative Trajectory and Risk Reasoning
Prompt:
"Please estimate the landing location of the hat. Is the hat getting closer to me or further away from me? Is there danger for the hat to hit me?"
Observed Patterns:
| Scenario Type | Cosmos-Reason2-8B | Qwen3-VL-8B-Instruct |
|---|---|---|
| Side throw away | Correctly identifies motion away; no danger | Incorrectly flags approaching danger |
| Spin + throw toward | Correctly flags approach and potential risk | Mixed interpretation; risk downplayed |
| Lateral throw | Correctly identifies safe distance | Verbose but inconsistent distance framing |
| Toss upward | Flags possible approach during descent | Treats as generally safe; less decisive |
Raw Model Outputs
**Side throw away:** | Model | Output | |-------|--------| | Cosmos-Reason2-8B | "The hat lands on the desk near the person working at the computer. It is getting further away from you. There is no danger for the hat to hit you." | | Qwen3-VL-8B-Instruct | "The hat is getting closer to you. It is falling downward and will likely land near your head or shoulders. There is a potential danger for the hat to hit you, so you should move your head away or duck to avoid it." | **Spin + throw toward:** | Model | Output | |-------|--------| | Cosmos-Reason2-8B | "The hat will land at the center of the frame, near the person. The hat is getting closer to me. Yes, there is a danger for the hat to hit me." | | Qwen3-VL-8B-Instruct | "The hat is currently being tossed upward and will land on the floor in front of you, slightly to your left. It is getting closer to you as it descends, and there is a low risk of it hitting you since it will land on the floor before reaching you." | **Lateral throw:** | Model | Output | |-------|--------| | Cosmos-Reason2-8B | "The hat is moving upward and to the left, away from your position. It is getting further away from you, and there is no immediate danger of it hitting you." | | Qwen3-VL-8B-Instruct | "The hat is currently in mid-air, moving upward and slightly forward from the woman's hand. Based on its trajectory, it will likely descend toward the floor or a nearby surface, not directly toward you. It is getting closer to the ceiling and then will begin to fall downward, so relative to your position, it is moving away from you as it ascends, then closer as it descends—but not in a direct path toward you. There is no immediate danger of the hat hitting you..." | **Toss upward:** | Model | Output | |-------|--------| | Cosmos-Reason2-8B | "The hat will land at the center of the frame, closer to the camera. It is moving closer to you, and there is a potential risk of it hitting you." | | Qwen3-VL-8B-Instruct | "The hat is currently being thrown upward and is moving away from you as it ascends. It will reach a peak and then begin to descend back toward the ground. Since it's moving away from you at the moment, it is not getting closer. There is no immediate danger of the hat hitting you..." |Interpretation:
Cosmos-Reason2-8B reasons more consistently in robot-relative spatial and risk terms, while Qwen3-VL-8B-Instruct often defaults to descriptive or narrative interpretations that may misjudge proximity.
3.2.2 Action Prediction Limitations
Prompt:
"What is the person doing? Can you predict what is the next action this person likely to take?"
Observation:
In several cases (e.g., the spinning scenario), Cosmos-Reason2-8B produces a generic descriptive explanation and does not reliably predict the upcoming throw. Qwen3-VL-8B-Instruct exhibits similar behavior.
Implication:
Cosmos-Reason2-8B shows its strongest advantages when prompts are explicitly robot-centric and action-relevant. For neutral third-person prompts, its behavior converges toward the base model.
3.3 Multi-Person Spatial Reasoning
Scenario
Multiple people appear at different depths around the robot.

Sample frame: Multiple people at varying distances from the robot's perspective
Prompt
"How many people are there in the view? Please describe the relative position of each person to me. Who is closest to me?"
Observed Outputs
| Aspect | Cosmos-Reason2-8B | Qwen3-VL-8B-Instruct |
|---|---|---|
| Person count | Correct | Correct |
| Relative positions | Explicitly reasoned from robot view | Descriptive |
| Closest person | Explicitly identified | Correctly stated |
Raw Model Outputs
**Cosmos-Reason2-8B:** > *\Interpretation
Both models succeed at counting and basic localization. Cosmos-Reason2-8B provides more explicit reasoning grounded in the robot's body frame, while the base model offers a flatter description.
3.4 Social Context Awareness (Handshake Between Humans)
Scenario
Two humans shake hands with each other within the robot's field of view.

Sample frame: Two humans shaking hands, observed from the robot's perspective
Prompt
"Does anyone in the view show interest to engage with me? Should I shake hands with anyone?"
Observed Outputs
| Model | Outcome |
|---|---|
| Cosmos-Reason2-8B | Correctly reasons the interaction is human-to-human and answers "No" |
| Qwen3-VL-8B-Instruct | Also answers "No", with a descriptive explanation |
Raw Model Outputs
**Cosmos-Reason2-8B:** > *\Interpretation
Both models reach the correct conclusion. Cosmos-Reason2-8B explicitly reasons about social participation boundaries, reinforcing appropriate non-engagement behavior.
4. Prompt Design Guidance
Based on observed behavior:
- Explicit egocentric framing is critical ("the camera view is my view")
- Relative, robot-centered questions outperform descriptive ones ("closer to me", "danger to me")
- Action-oriented prompts highlight Cosmos advantages
- Neutral third-person prompts reduce differentiation from the base model
5. Summary Comparison
| Dimension | Cosmos-Reason2-8B | Qwen3-VL-8B-Instruct |
|---|---|---|
| Human intent toward robot | Strong | Weak |
| Robot-relative object motion | More consistent | Inconsistent |
| Collision risk assessment | Conservative and grounded | Frequently over- or under-estimates |
| Multi-person spatial reasoning | Explicit | Descriptive |
| Social boundary awareness | Explicit | Correct but implicit |
6. Key Takeaways
Based on the evaluated test results:
- Cosmos-Reason2-8B demonstrates clear advantages when reasoning is framed from an embodied robot perspective, particularly for intent recognition, physical risk assessment, and social engagement decisions.
- For neutral or third-person prompts, behavior converges toward the base model, underscoring the importance of prompt alignment with embodiment.
These results support Cosmos-Reason2-8B as a strong foundation for social robots and physical AI systems, where physical law constraints and action relevance are critical.
Limitations and Future Work
This evaluation was conducted within a constrained time frame, which limited the scope of benchmark design. As a result, the current test set represents a preliminary exploration rather than a comprehensive benchmark. Future work should address the following:
- Expanded test coverage — Increase the number and diversity of test scenarios to improve statistical robustness
- Systematic example selection — Apply more rigorous criteria for scenario selection to ensure balanced representation across interaction types
- Additional capability testing — Incorporate tests for object handoffs and emotional state awareness, as noted in Section 1
Document Information
Publication Date: January 1, 2026
Citation
If you use this recipe or reference this work, please cite it as:
@misc{cosmos_cookbook_intbot_2026,
title={Egocentric Social and Physical Reasoning with Cosmos-Reason2-8B},
author={Zhang, Tingyu and Yang, Sharon},
organization={IntBot Inc.},
year={2026},
month={January},
howpublished={\url{https://nvidia-cosmos.github.io/cosmos-cookbook/recipes/inference/reason2/intbot_showcase/inference.html}},
note={NVIDIA Cosmos Cookbook}
}
Suggested text citation:
Tingyu Zhang, & Sharon Yang (2026). Egocentric Social and Physical Reasoning with Cosmos-Reason2-8B. In NVIDIA Cosmos Cookbook. IntBot Inc. Accessible at https://nvidia-cosmos.github.io/cosmos-cookbook/recipes/inference/reason2/intbot_showcase/inference.html